Table of Contents¶
Governing Equations¶
The shallow water equations are:
where the velocity \((\vec{V})\) is two dimensional and therefore potential vorticity \((\vec{\eta})\) only has a component in the out of plane (normal) direction:
Domain¶
The equations are discretized on a two dimensional Cartesian domain \(\Omega = \left\{ (x,y) : 0 \leq x \leq L_x, 0 \leq y \leq L_y \right\}\) .
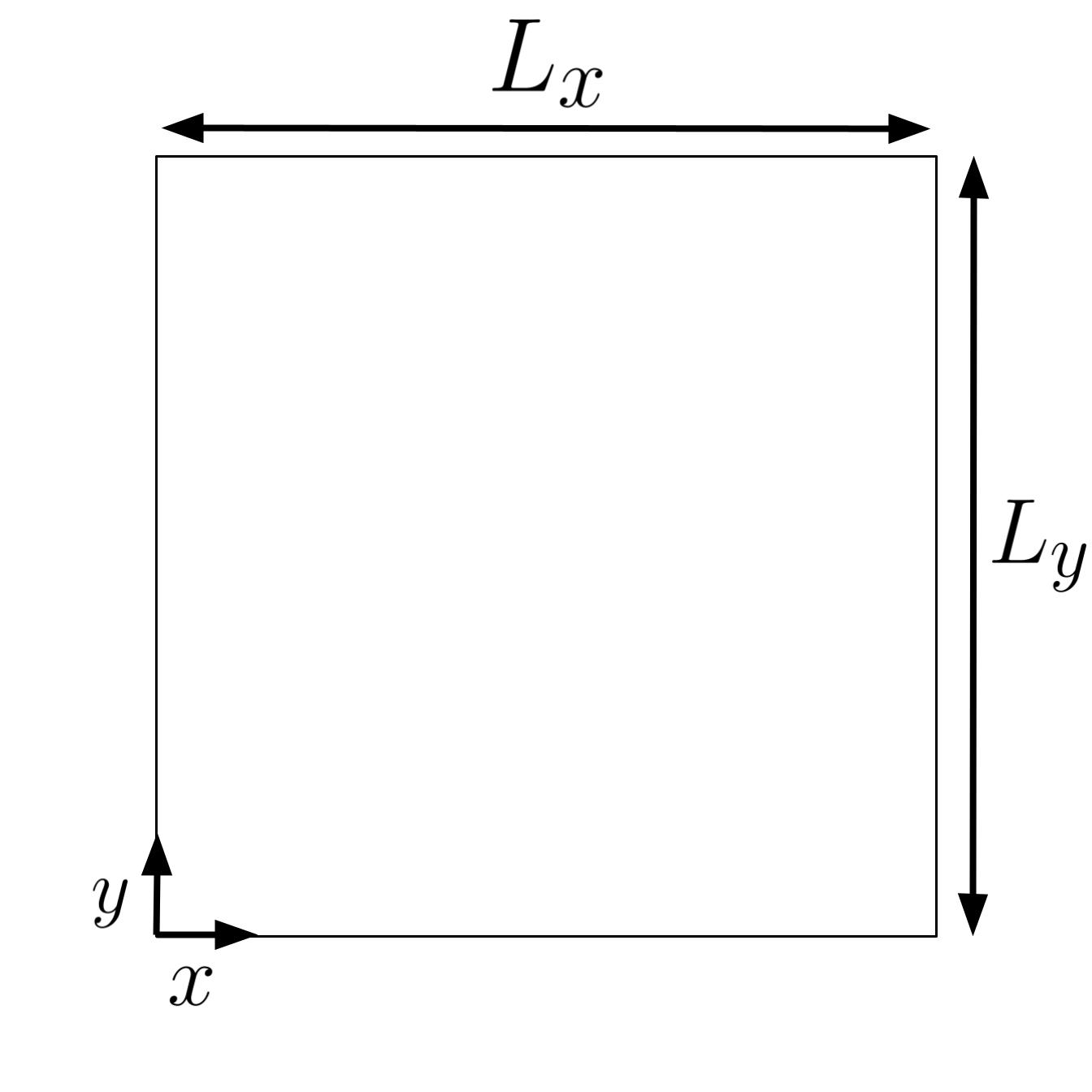
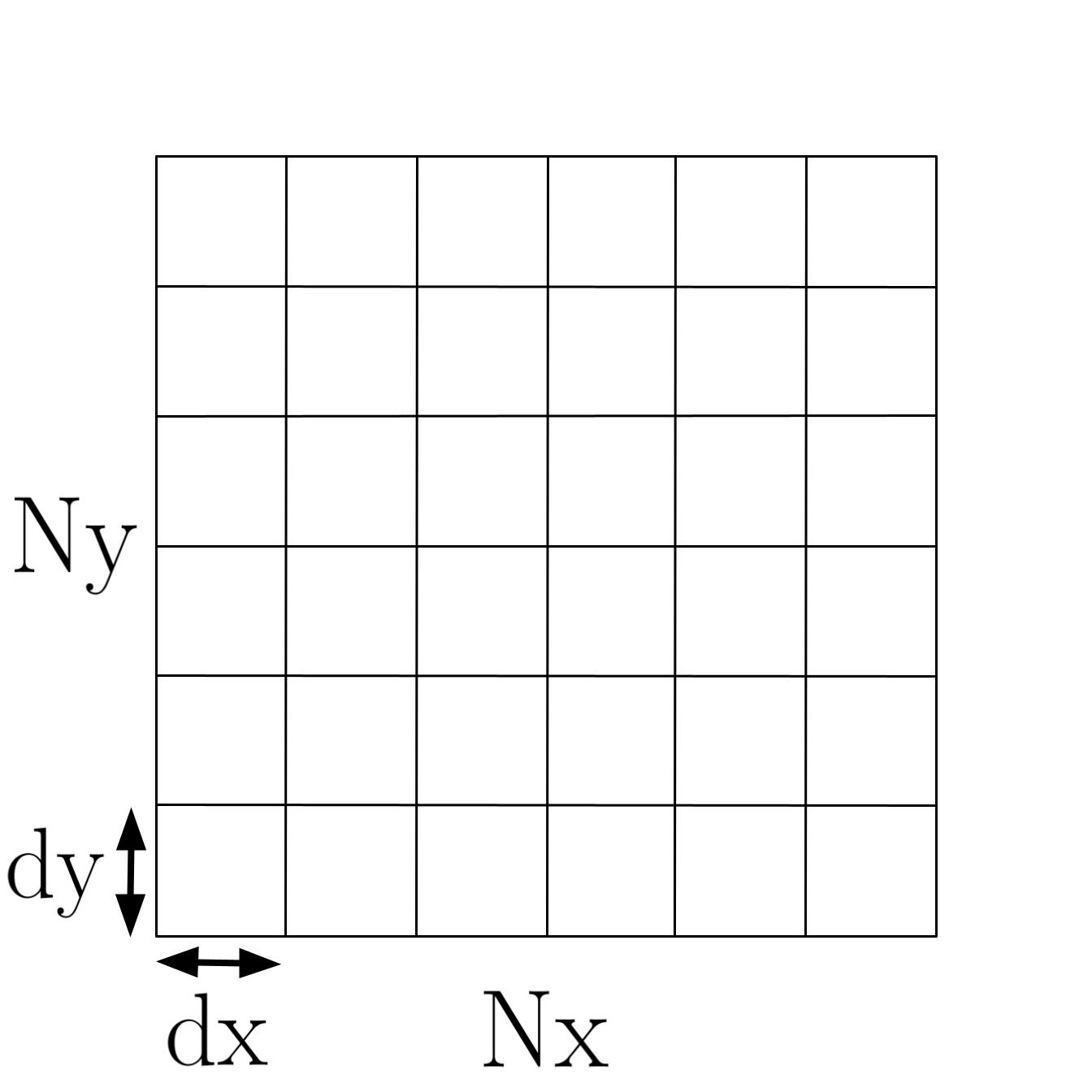
The domain is discretized using a Cartesian mesh with a uniform step size in each direction. The step size (dx, dy) and number of cells in each direction (Nx, Ny) can be varied independently. Their values then implicitly sets the length of the domain in each direction \((L_x = Nx * dx, \ L_y = Ny * dy)\).
Typically when we run the code the step size in each direction is kept at a default value of dx=dy=\(10,000\) and the user changes the number of cells (Nx, Ny) to vary the problem size.
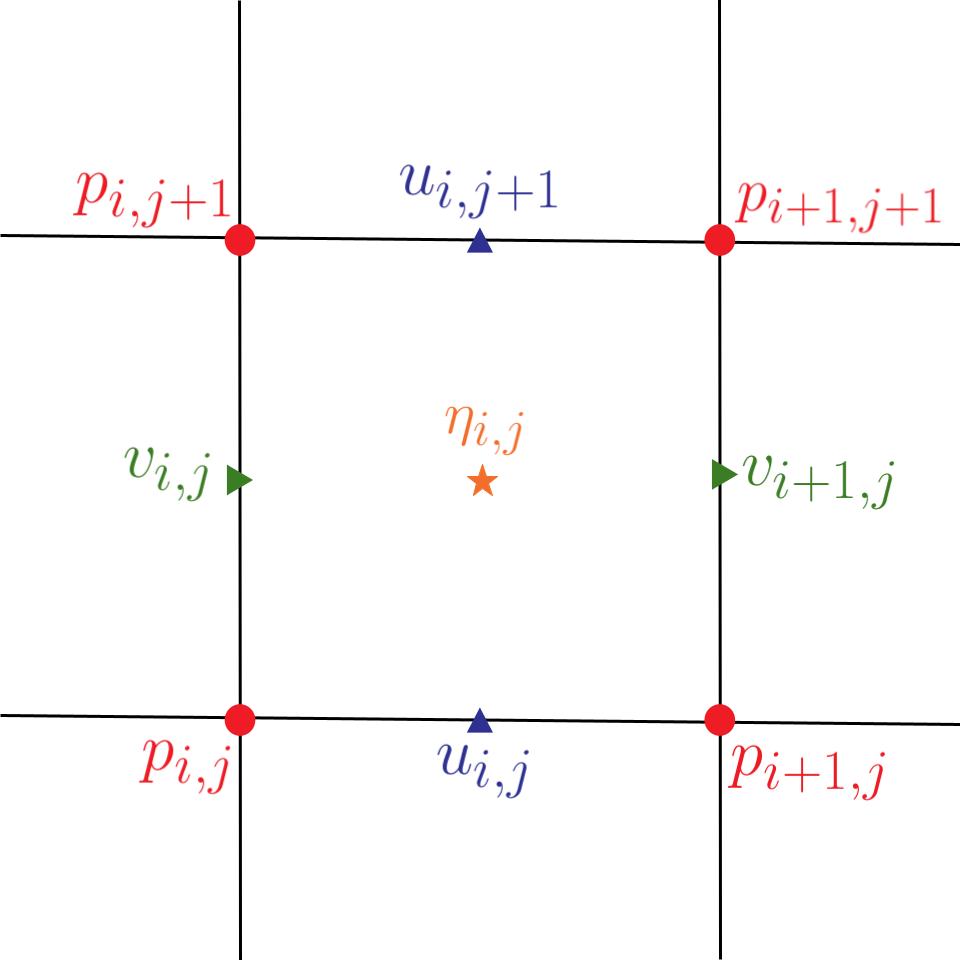
The figure below shows where the variables are saved on the mesh. The x velocity component \((u)\) is saved on the y faces (faces with normal vector \(\hat{j}\)). The y velocity component \((v)\) is saved on the x faces (faces which have a normal vector of \(\hat{i}\)). The pressure \((P)\) is saved on the nodal points and the potential vorticity \((\eta)\) is saved on the cell centers. The legend shows the color and symbol associated with each location. This color and symbol notation will be used to signify variable location throughout this documentation.
The indexing scheme used for the nodal, face centered, and cell centered values varies depending on the implementation. The indexing scheme shown in the figure below is used in the AMReX versions of the mini-app.
Note that the user inputs the number of cells in each direction (Nx, Ny), hence the data structures used to store values at the nodal and face centered locations need to be allocated larger to accommodate the extra values.
Initial Conditions¶
An analytical initial condition is specified for the velocity and pressure.
The velocity is initialized using an analytical stream function.
where the amplitude is set to a default value of $$ A = 10^6 $$
and \(\xi_x\) and \(\xi_y\) are the spatial variables \(x\) and \(y\) transformed onto the interval \((0, 2\pi)\).
Then the initial velocity is set to:
Note: This is what is in the code but usually I see the stream function defined so that \(u = \frac{\partial \phi}{\partial y}\) and \(v = -\frac{\partial \phi}{\partial x}\). I don't think it matters since either definition of the stream function automatically satisfies the two dimensional incompressible continuity equation. Just a note this is what most textbooks I have come across would call \(-\psi\).
In the implementation the stream function \(\psi\) is evaluated and saved at the cell centers, then the central finite difference is used to find \(u\) and \(v\) at the adjacent faces.
The initial pressure is evaluated at all the nodal points using:
Boundary Conditions¶
Periodic boundary conditions are applied in both the x and y directions. The specific implementation of how the boundary conditions are applied varies between different versions of the code in the SWM repository.
Numerical Methods¶
Equations¶
We are going to use an explicit method for time integration. So it is useful to put the governing equations into component form and move everything but the time derivatives to the right hand side of the equals sign:
where:
Notice that several terms appear multiple times in the right hand of our governing equations. Rewriting the governing equations in terms of these intermediate variables gives:
where:
Numerical Interpolation¶
Interpolation between the various locations where data is saved is required when evaluating the intermediate variables and the right hand side of the governing equations. Linear interpolation is used throughout the code to do this. The figures below show how interpolation is done for a generic 2D variable \(\phi_{i,j}\).
Node to X face 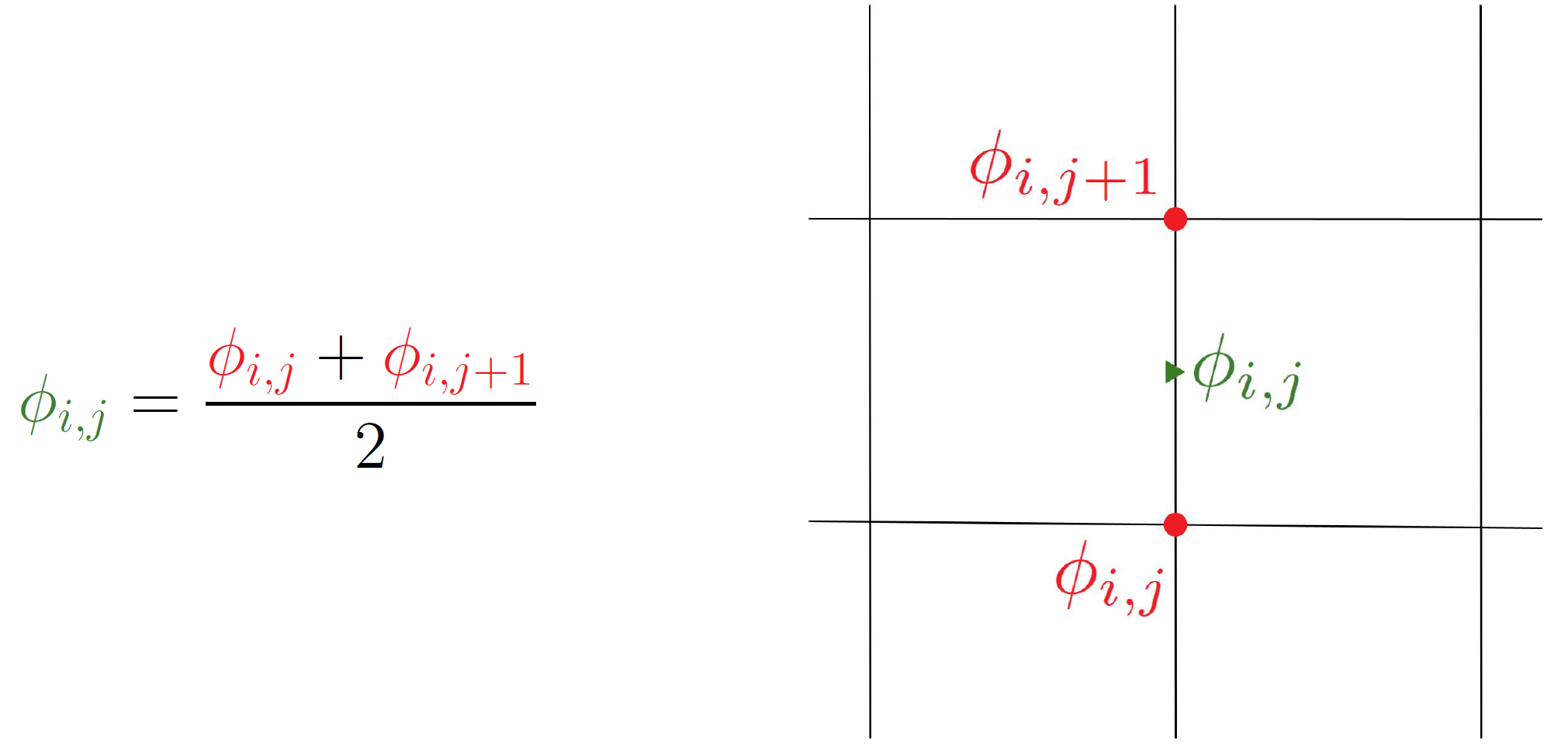 Node to Y face
Node to Y face 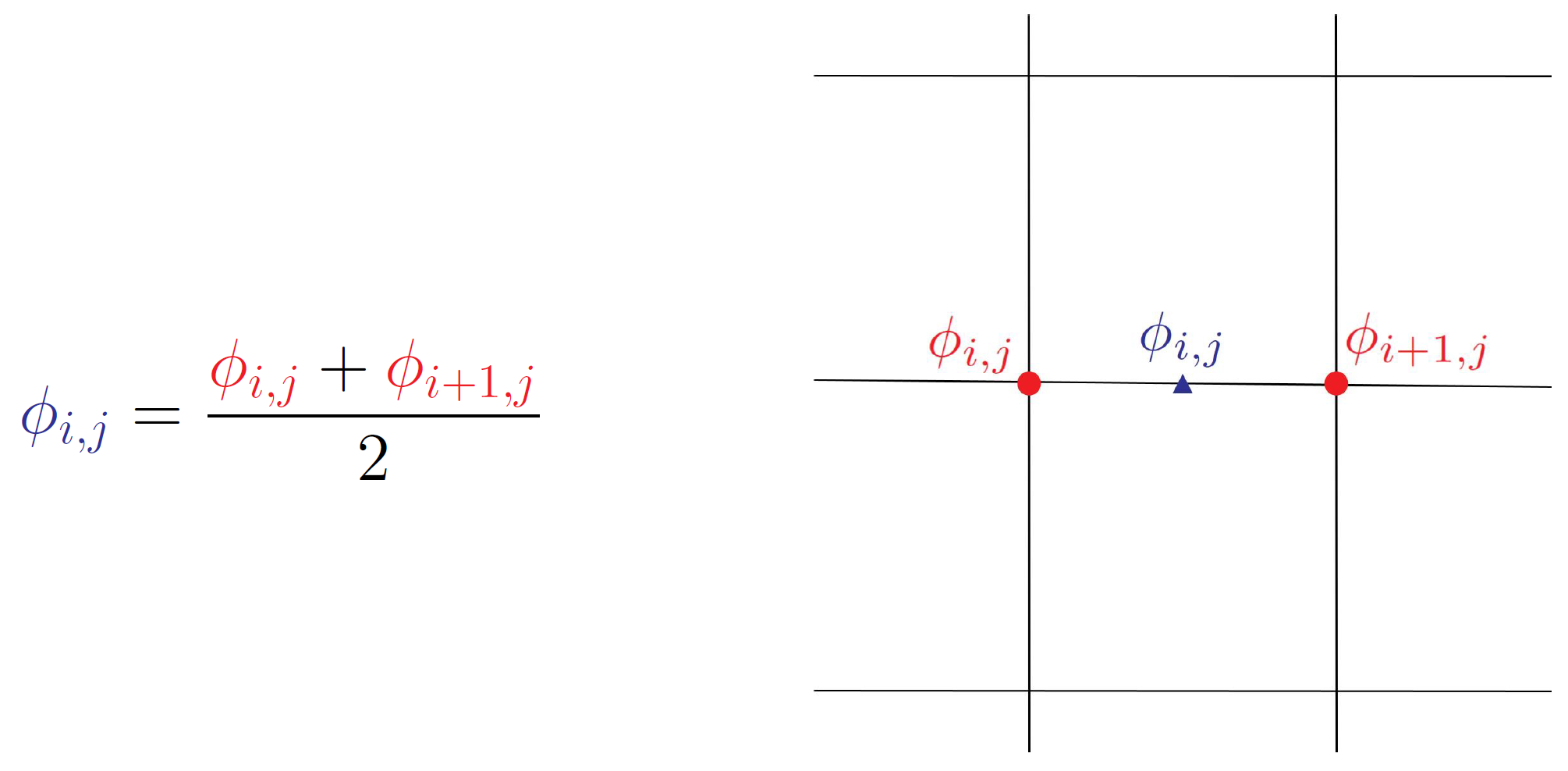 Node to Cell Center
Node to Cell Center 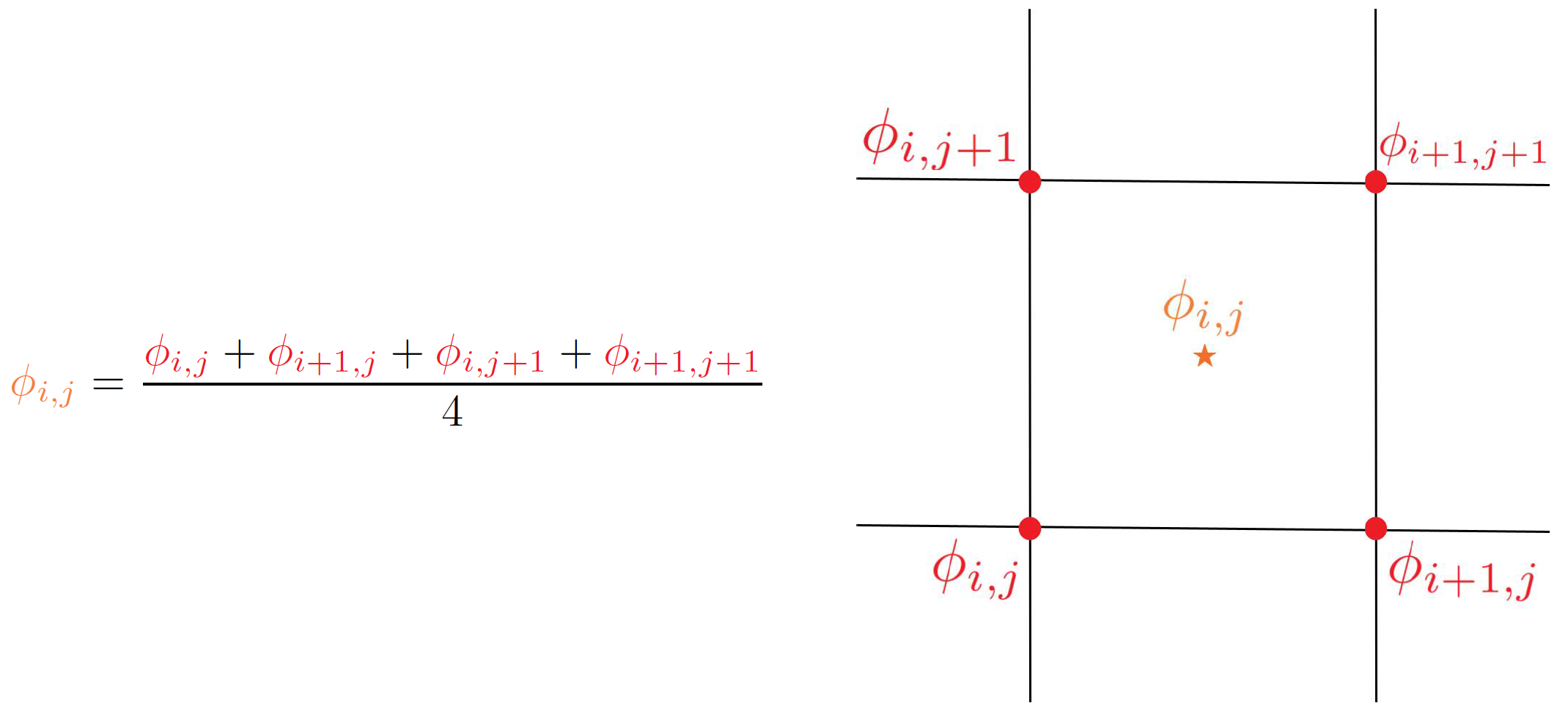
X face to Node 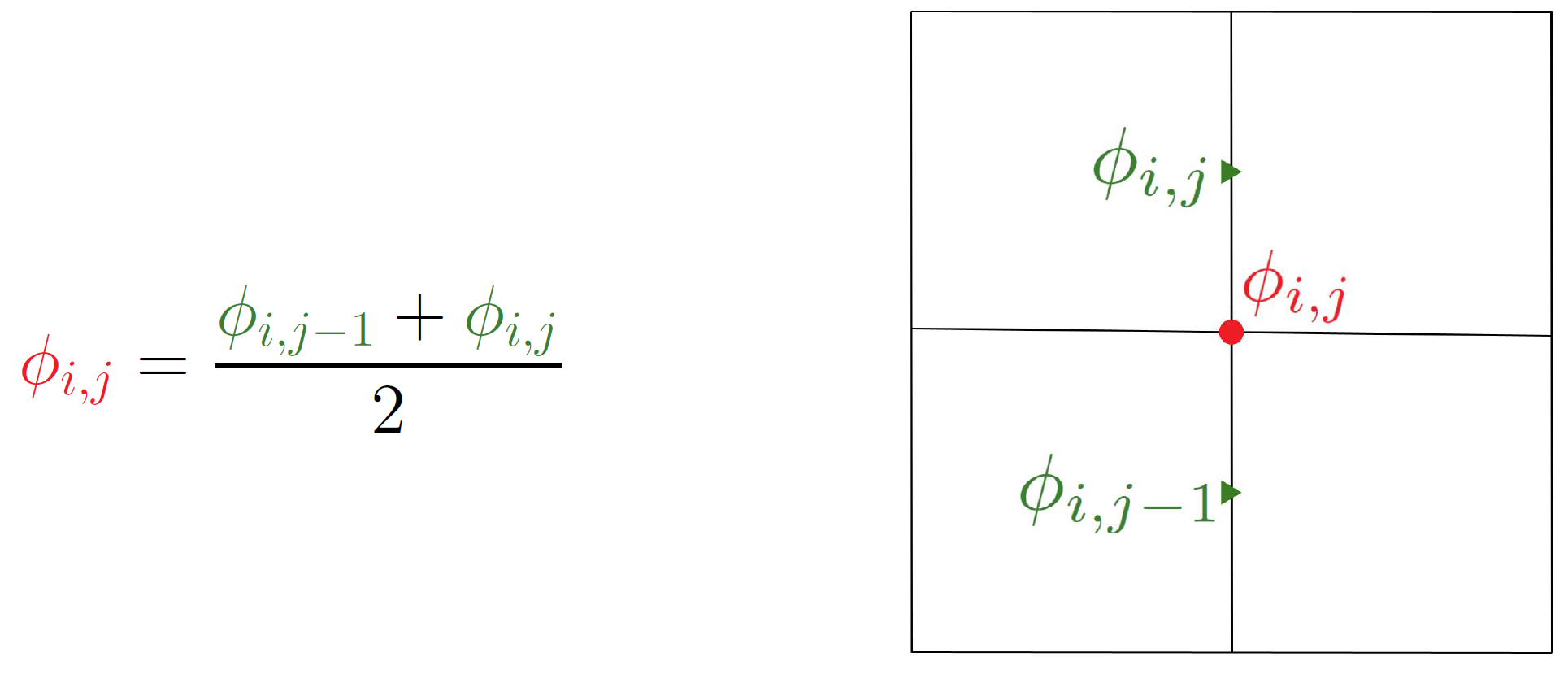 X face to Y face
X face to Y face 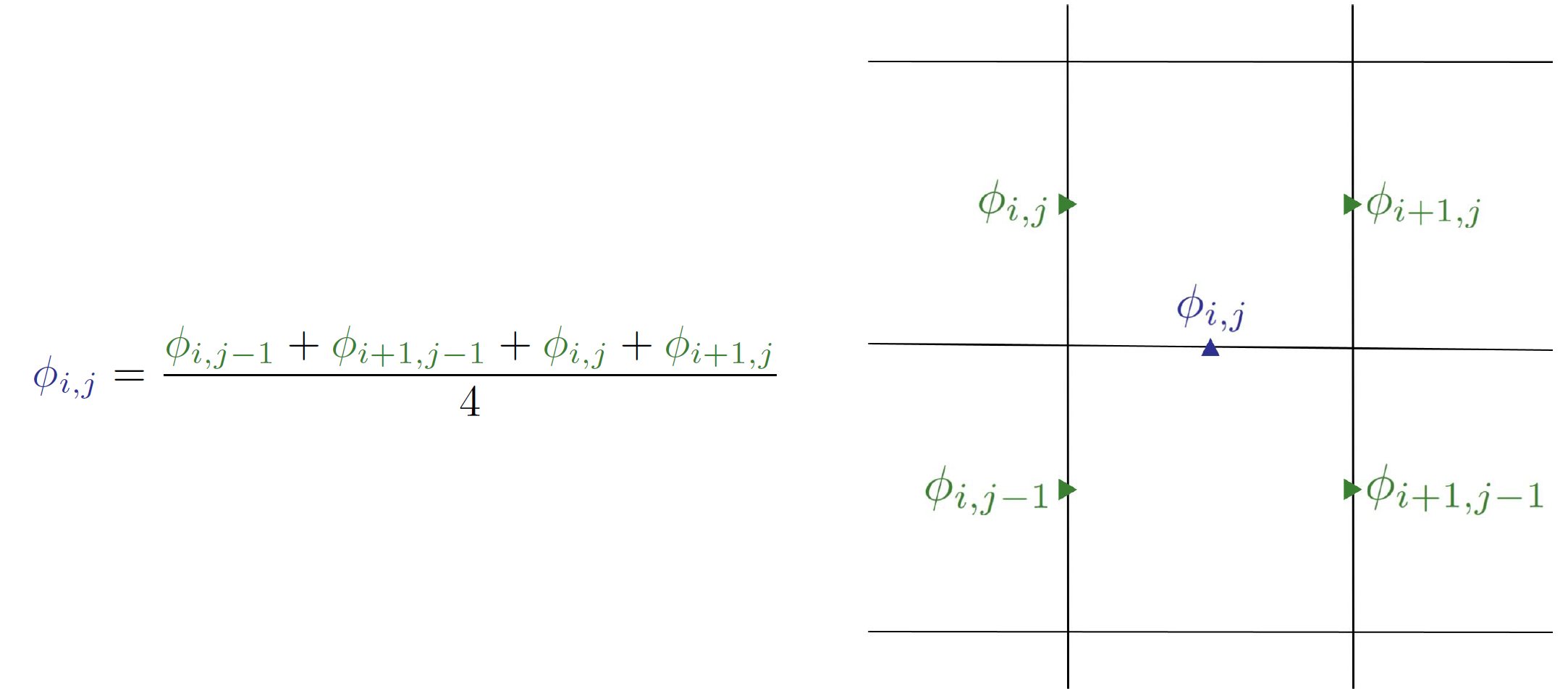 X face to Cell Center
X face to Cell Center 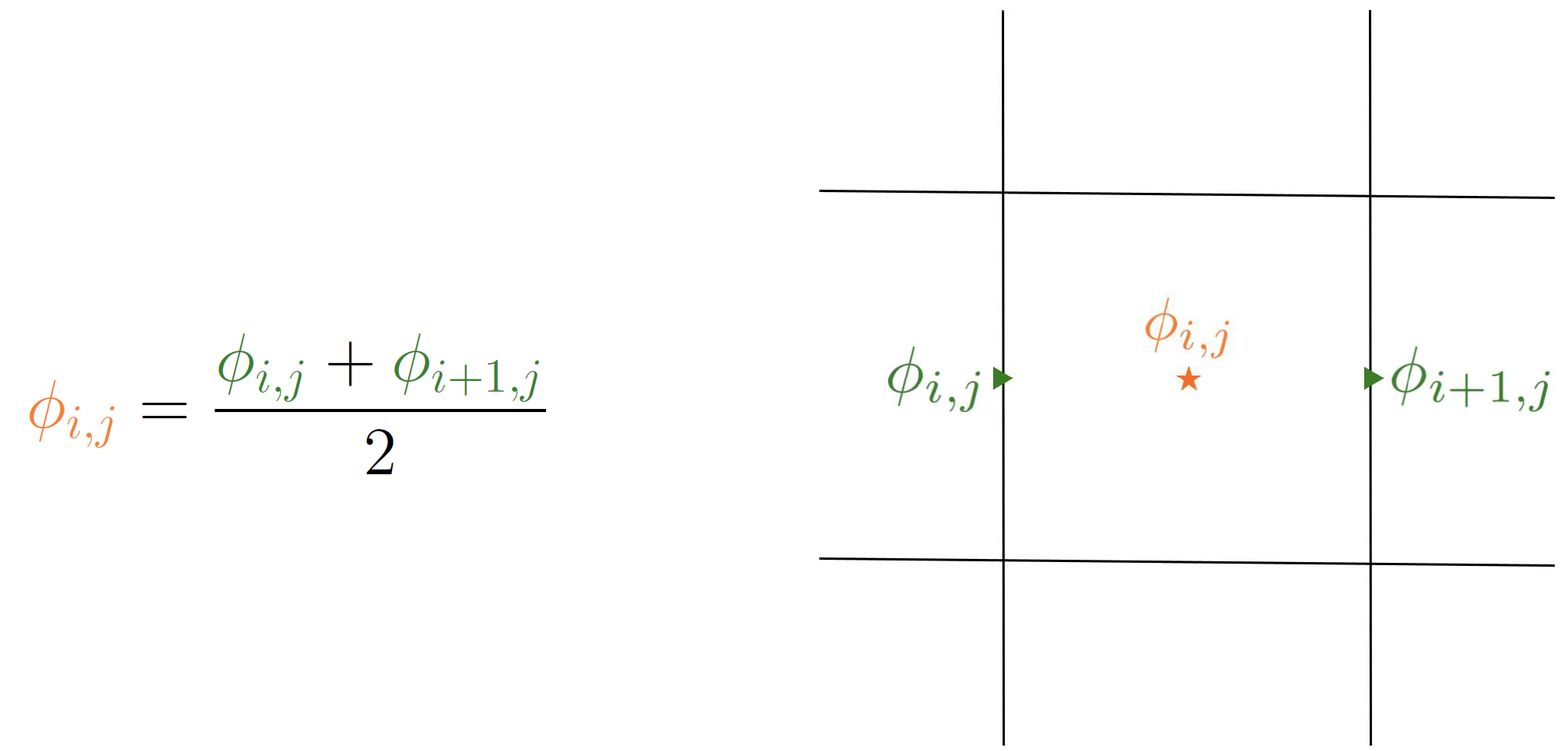
Y face to Node 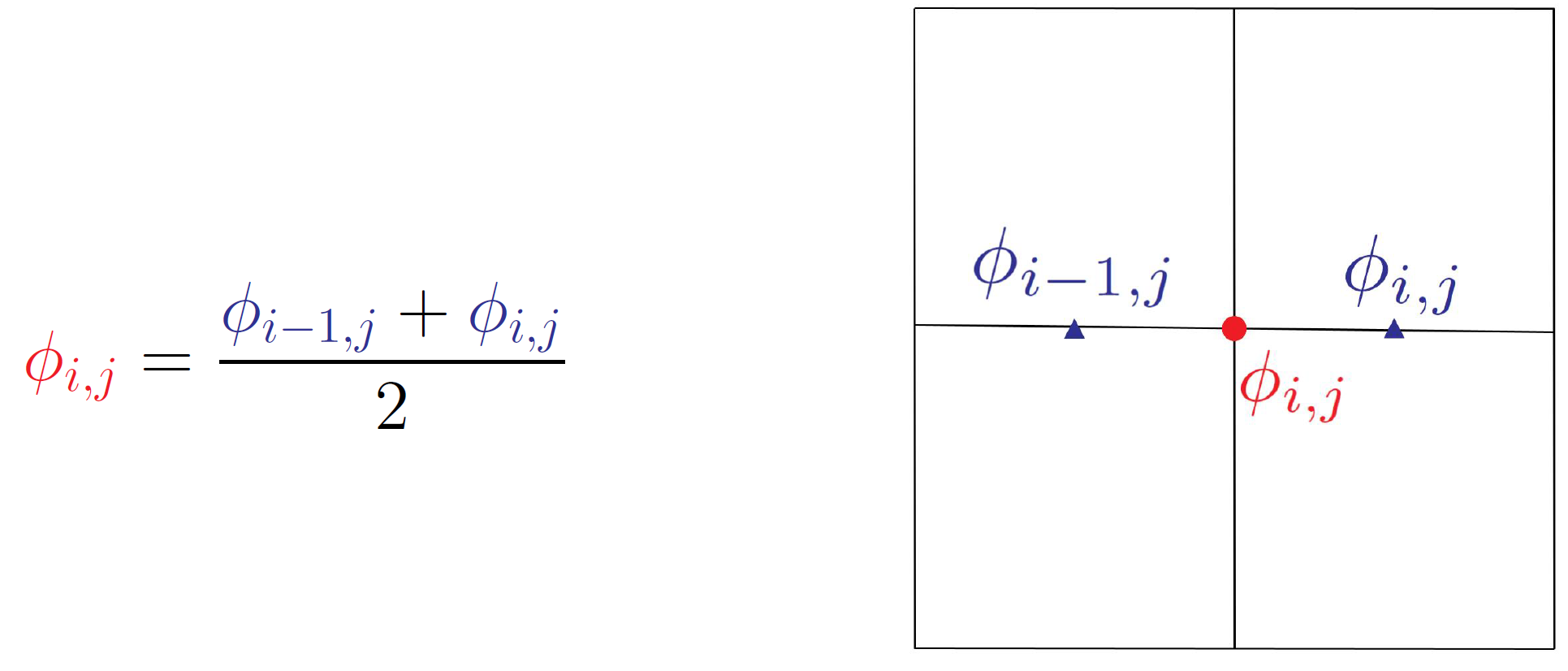 Y face to X face
Y face to X face 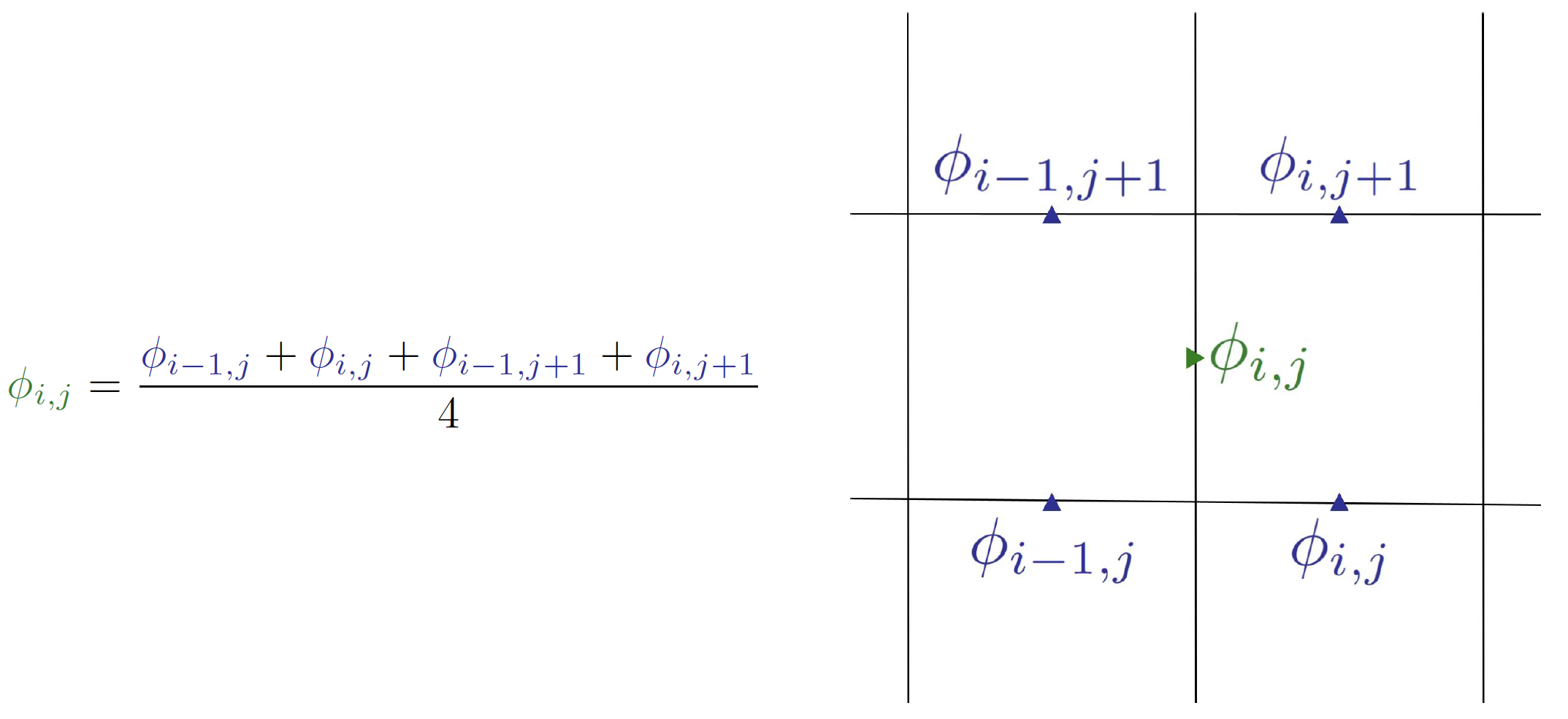 Y face to Cell Center
Y face to Cell Center 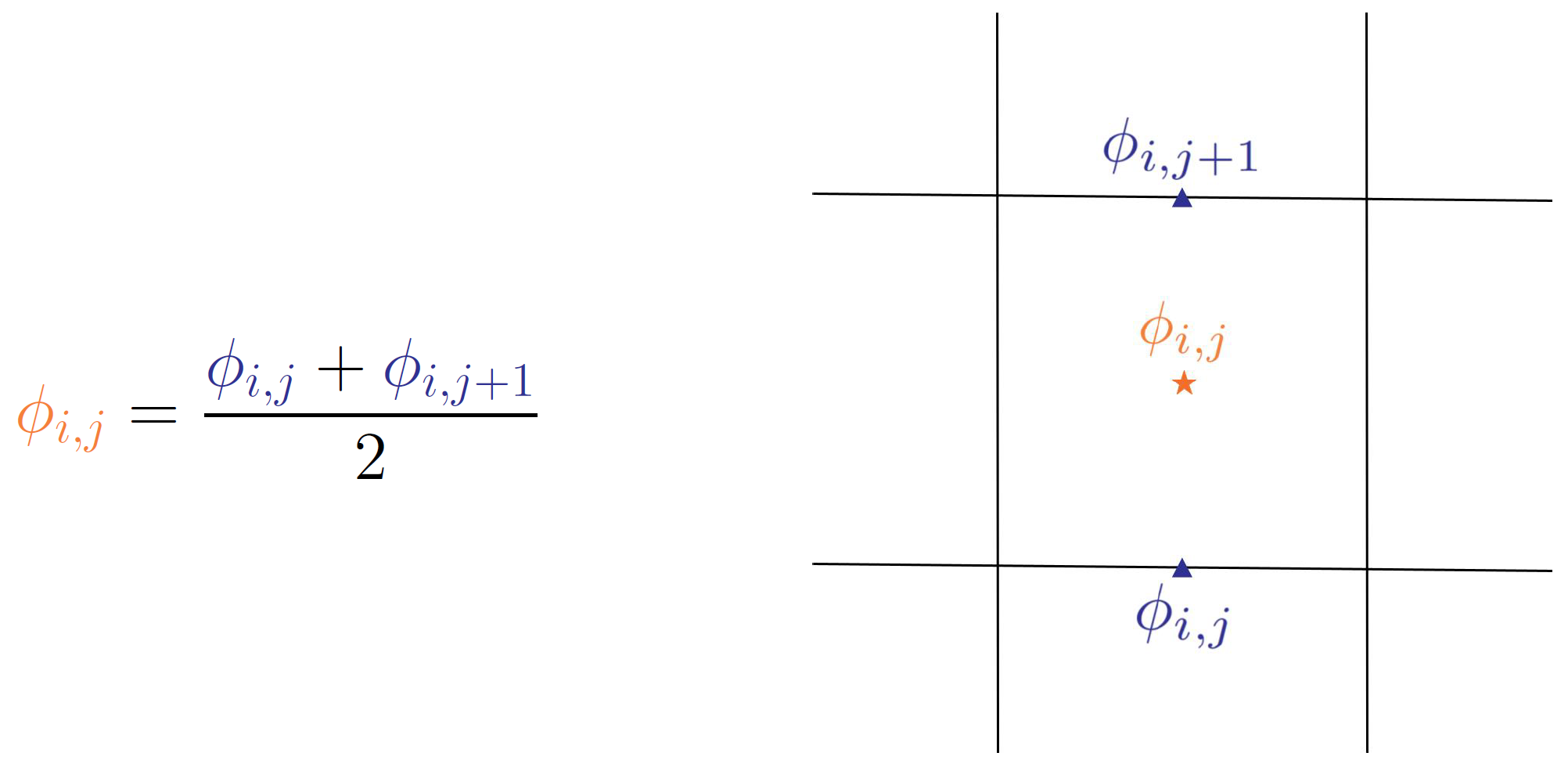
Cell Center to Node 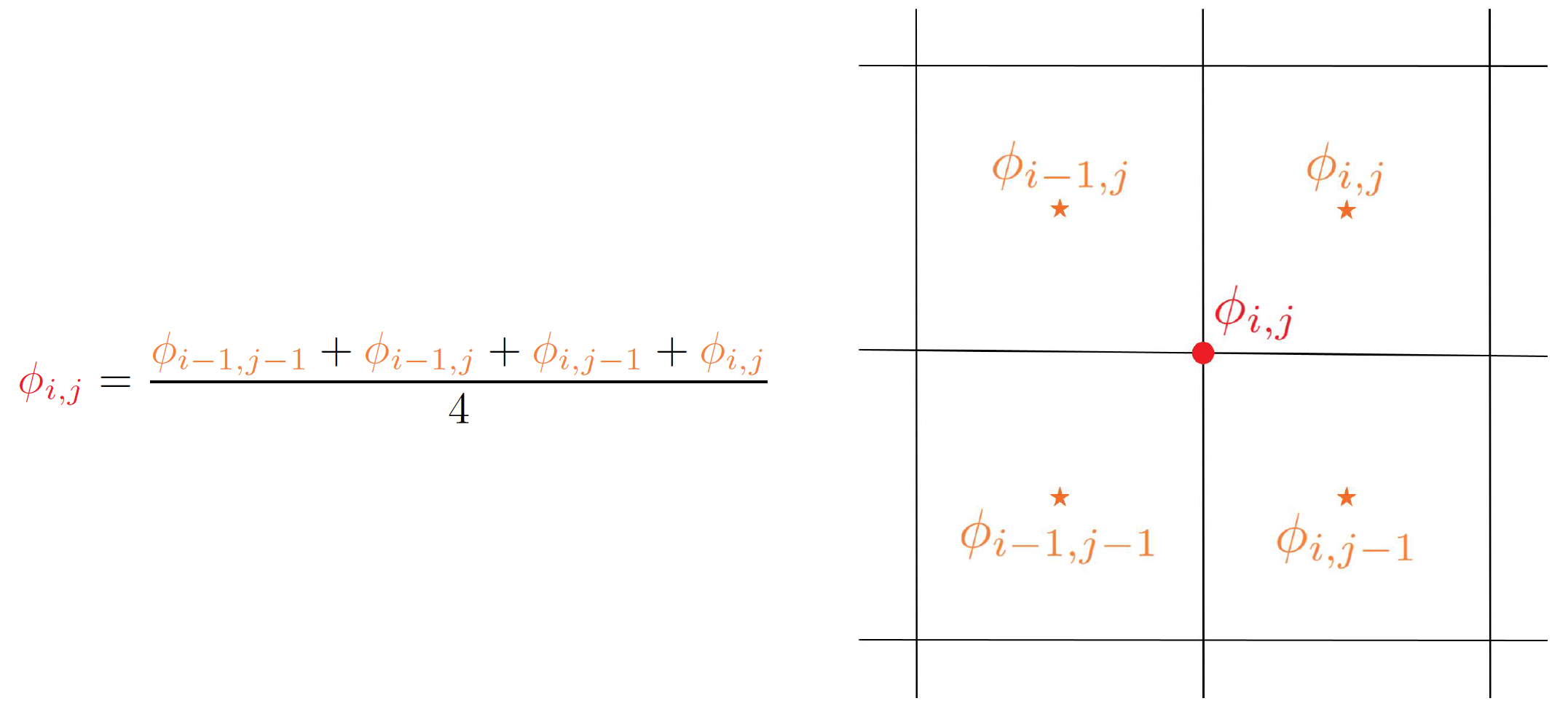 Cell Center to X face
Cell Center to X face 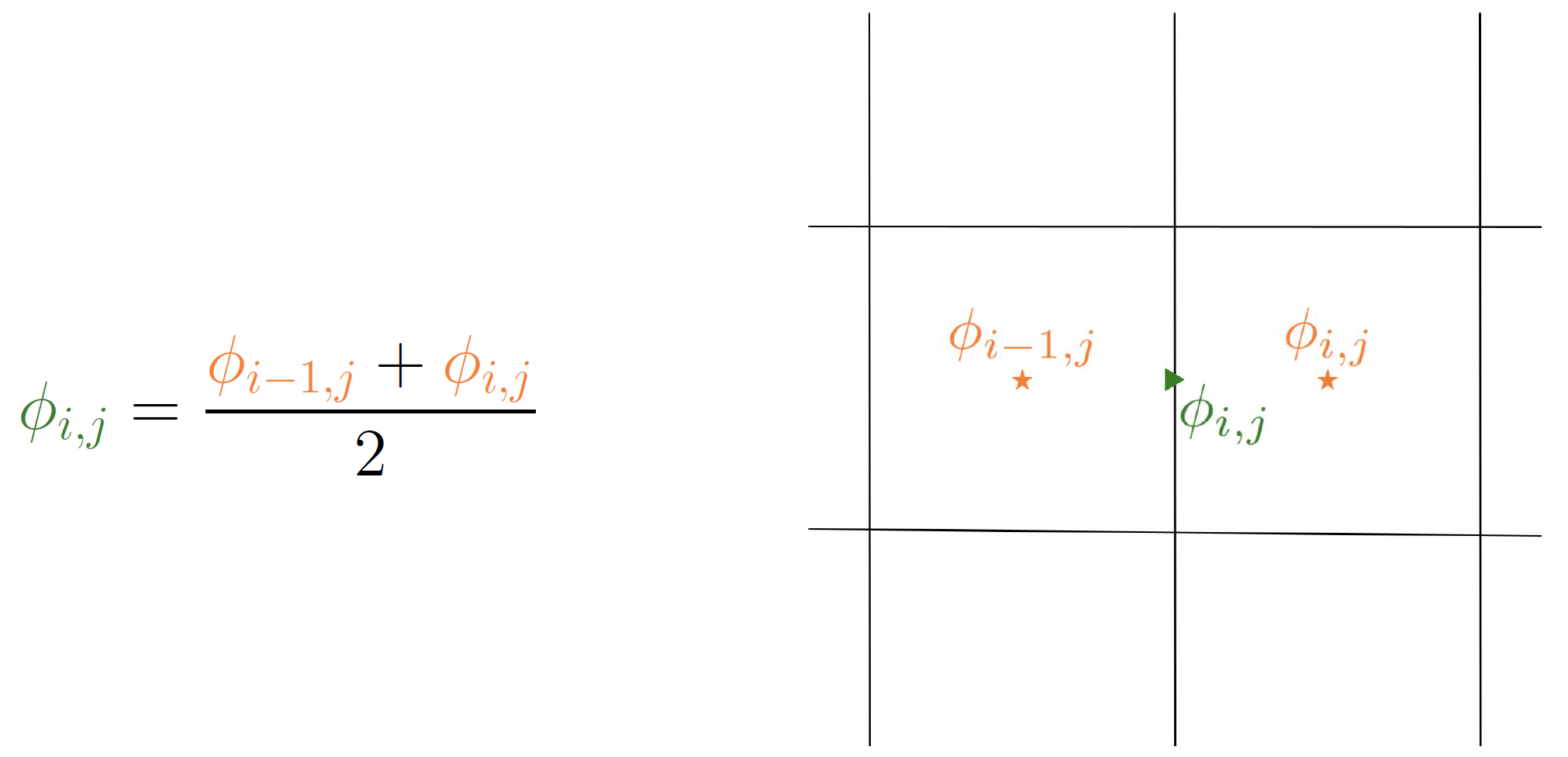 Cell Center to Y face
Cell Center to Y face 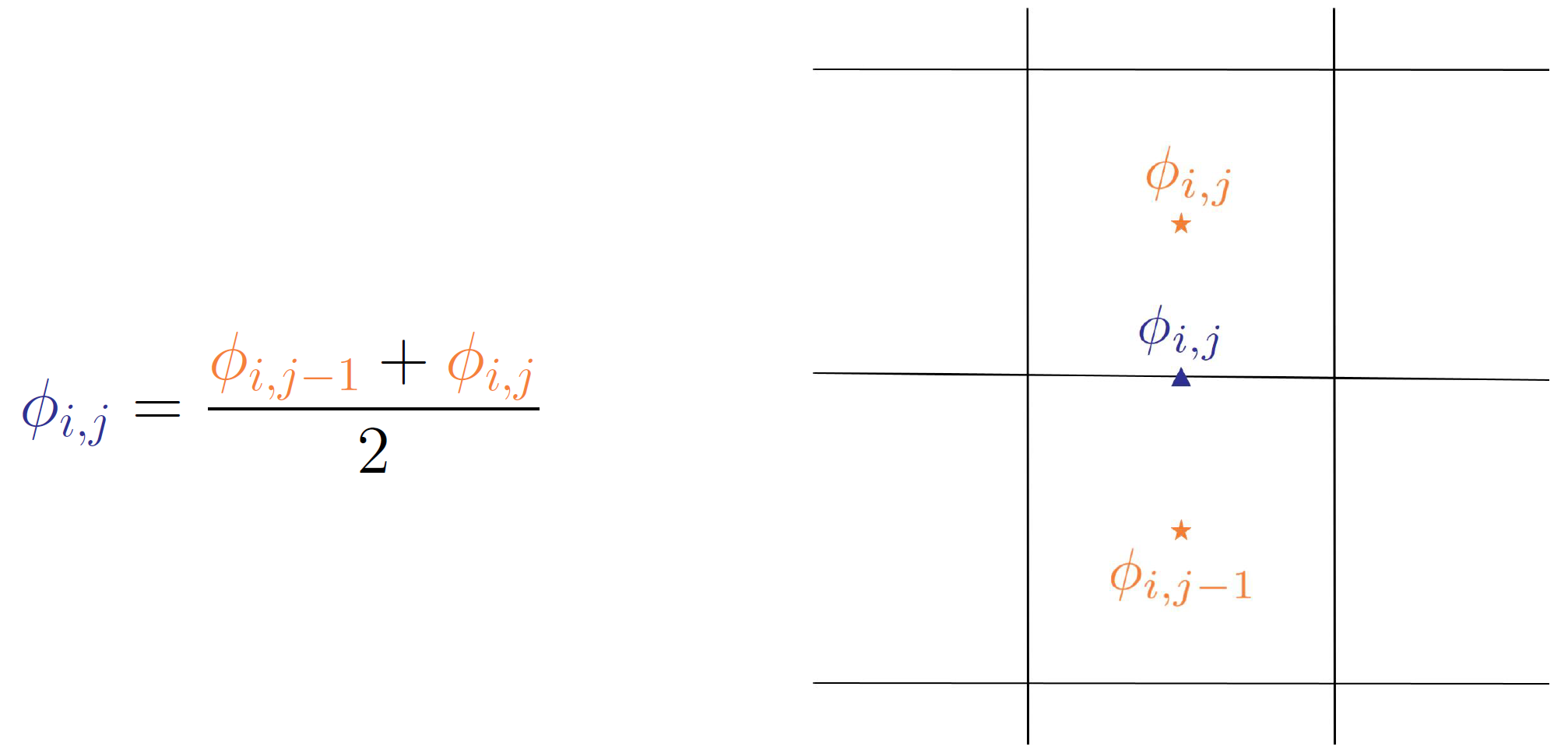
Numerical Differentiation¶
Second order central finite differencing is used to compute the spatial derivatives. For example to find the derivative of a generic 2D variable \(\phi_{i,j}\) with respect to the x direction:
Likewise when differentiating with respect to y we get:
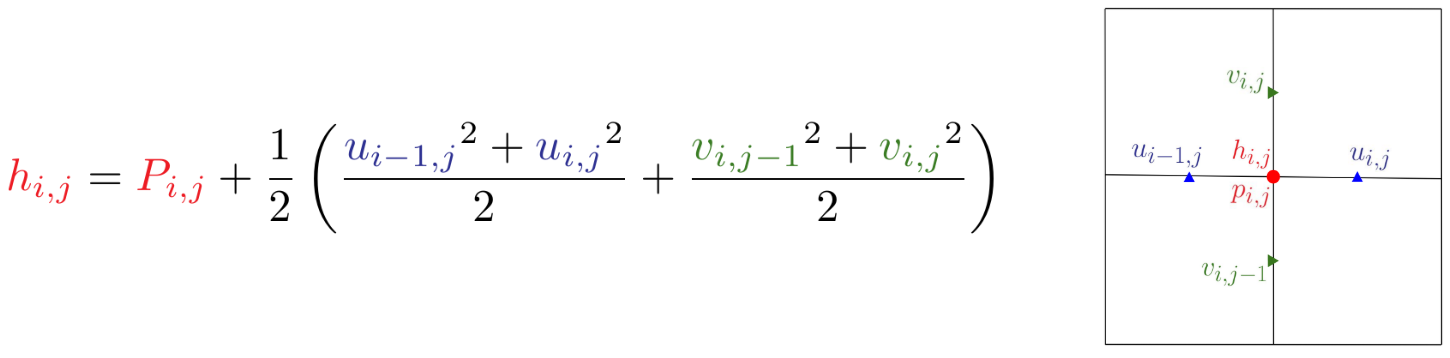
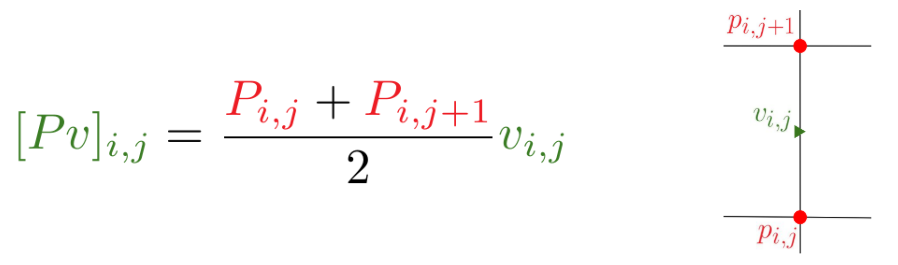
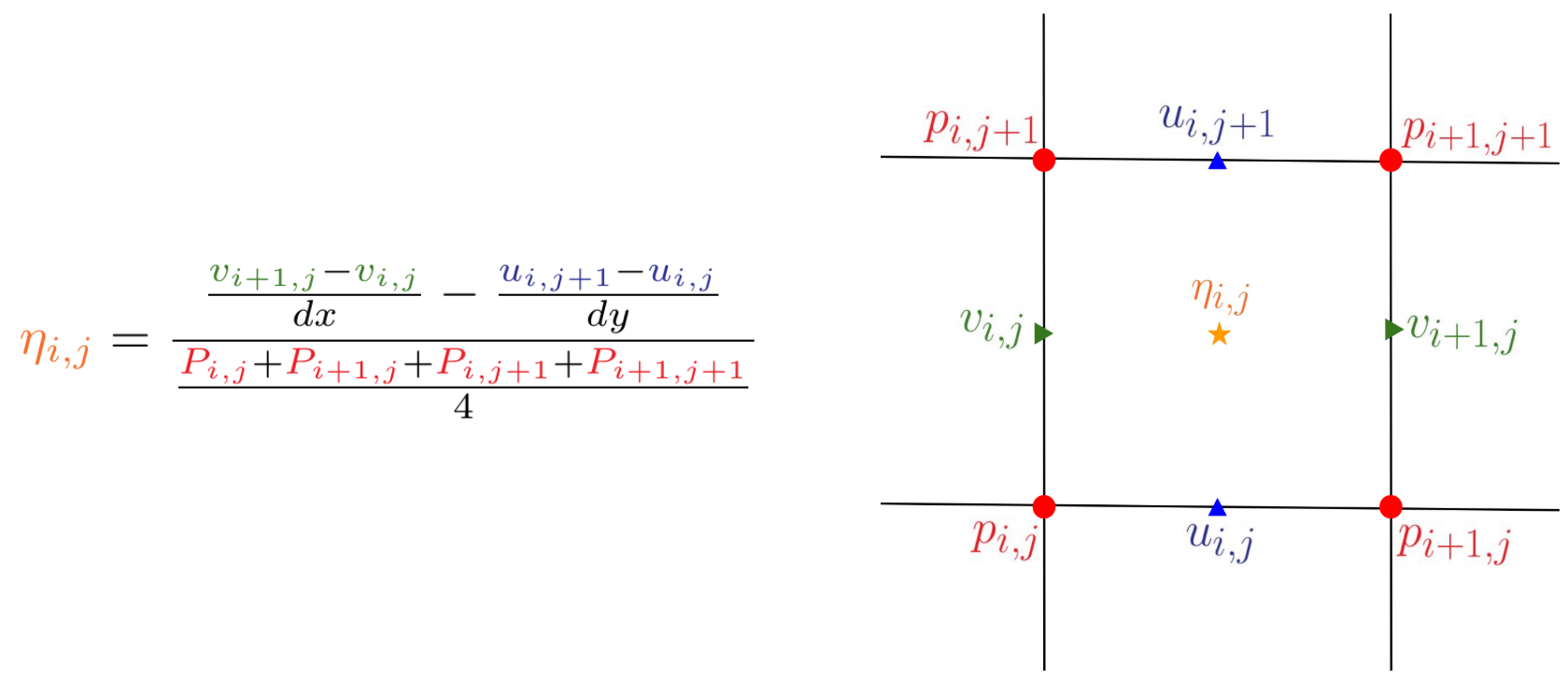
Compute intermediate Variables¶
Now compute the intermediate variables that appear on the right hand side of our governing equations. When doing this we need to keep in mind where each variable is stored and do the appropriate interpolation and numerical differentiation.
Note: The figures that I have made use slightly different notation for the pressure velocity products that are used as intermediate variables. So \(c_u\rvert_{i,j} = [Pu]_{i,j}\) and likewise \(c_v\rvert_{i,j} = [Pv]_{i,j}\).

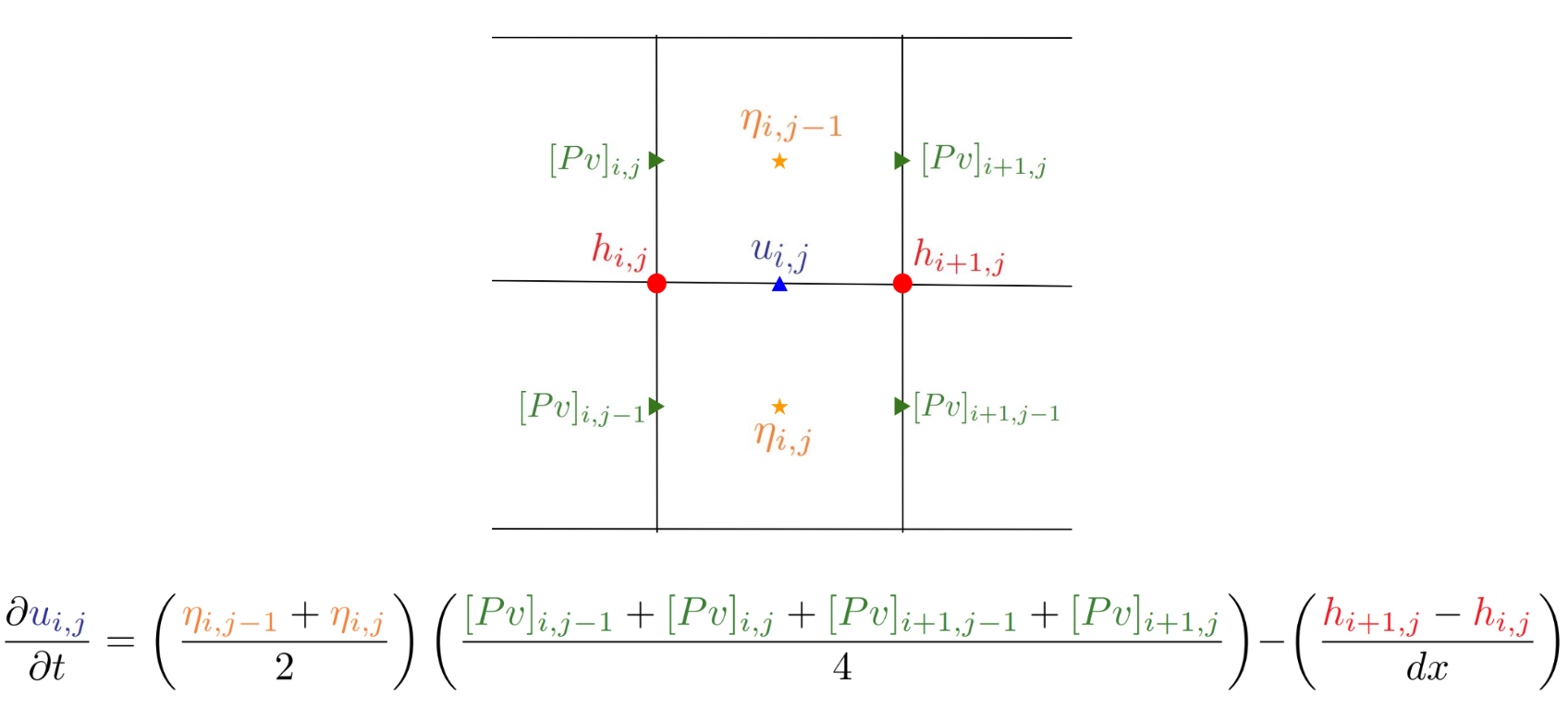
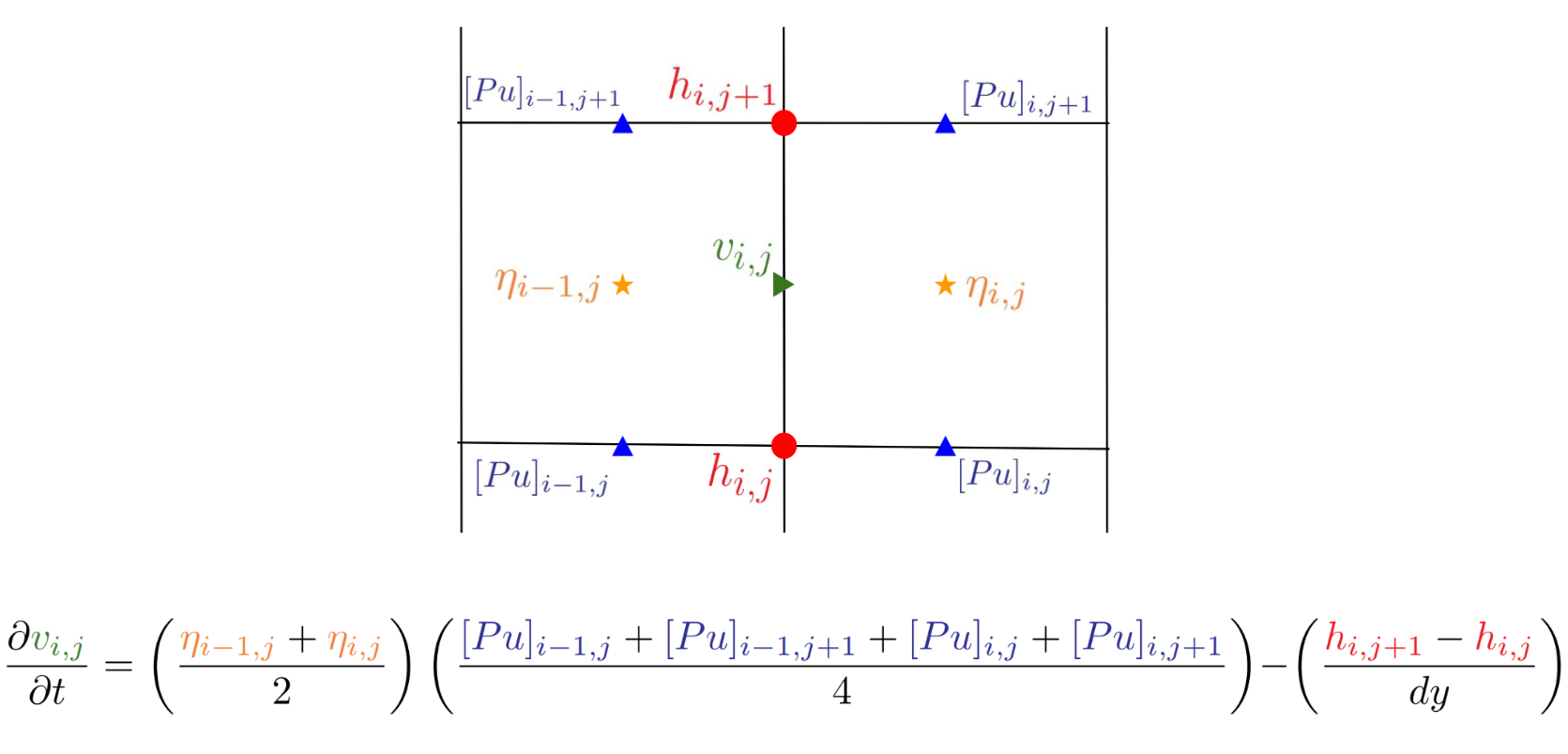
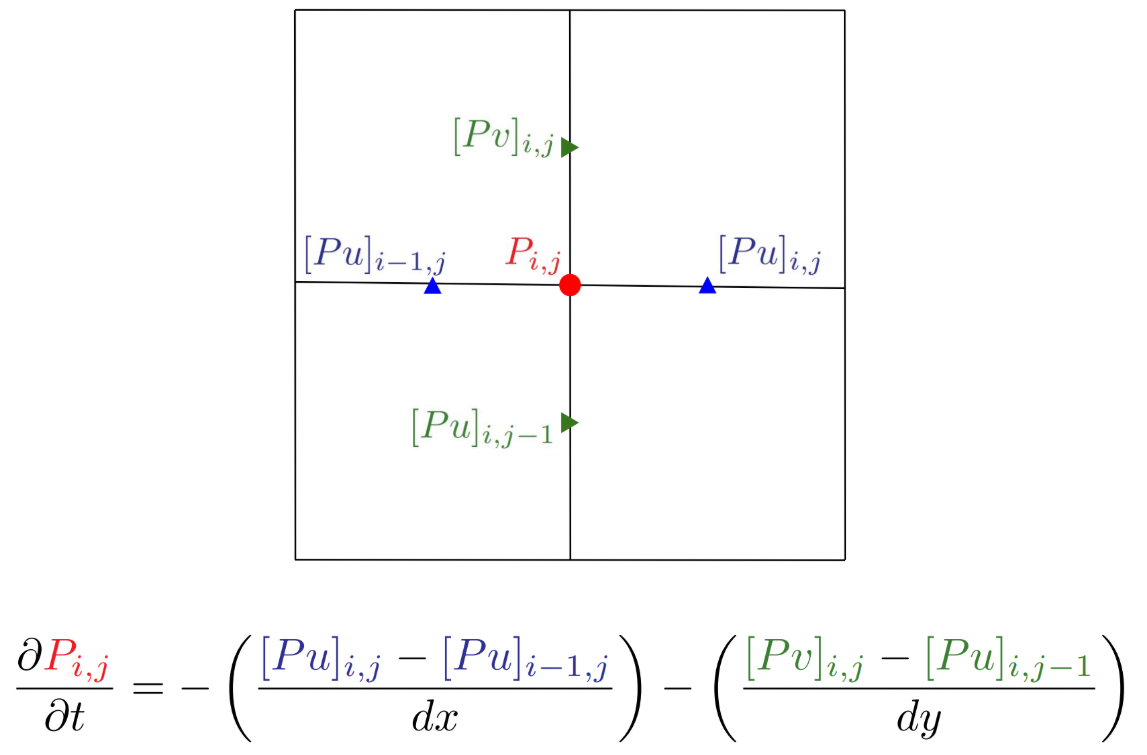
Compute the right hand side of the semi-discretized equations:¶
Now that we have the intermediate variables computed we can compute the right hand side of our governing equations. Again doing the appropriate interpolation to the location of each of the primitive variables we are going to time advance.
Time Stepping¶
Explicit Euler is used for the first time step.
TODO: Add documentation for subsequent time stepping using hard coded relaxation value.